I.  Giới thiệu chung
Giới thiệu chung
Pix4Dmapper là phần mềm chuyên dụng trong việc xử lý phân tích dữ liệu ảnh bay chụp từ các thiết bị không người lái (UAV) trong các dự án bay vẽ địa hình tỷ lệ lớn với độ chính xác cao do hãng Pix4D (Thụy sỹ) phát triển và cung cấp với 2 mức sản phẩm: Pix4Dmapper Discovery (bản dùng thử) và Pix4Dmapper Pro.
Pix4Dmapper Pro phiên bản 2.0.x sử dụng công nghệ bản quyền và dựa hoàn toàn vào thông tin từ ảnh chụp cho phép xử lý khối lượng lớn ảnh bay chụp với các loại máy ảnh / máy quay video từ các loại thiết bị UAV khác nhau - dạng cánh bằng hoặc dạng trực thăng, như: SenseFly Swinglet, DJI Phantom, 3D Robotics, Tetracam, CropCAM UAV...
Ngoài ra, phần mềm có thể xử lý bộ dữ liệu ảnh chụp đa phổ gồm ảnh RGB, Camera NIR, Camera IR, Camera nhiệt,… cũng như không yêu cầu các thông số IMU (vận tốc máy bay, hướng và lực hấp dẫn) của UAV.
II. Nguyên lý hoạt động
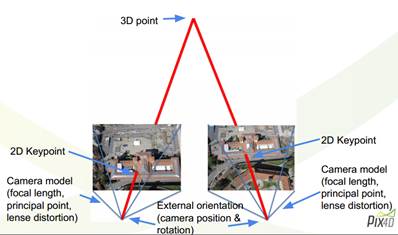 Pix4Dmapper xử lý hình ảnh dựa vào việc tìm kiếm tự động hàng ngàn các điểm chung giữa các ảnh có độ chồng phủ (overlap) cao. Mỗi điểm đặc trưng được tìm thấy trên mỗi ảnh được gọi là 1 Keypoint. Khi cùng 1 keypoint được tìm thấy trên 2 ảnh là như nhau, chúng sẽ được kết hợp lại và mỗi nhóm keypoint phù hợp chính xác sẽ tạo thành 1 điểm 3D. Tập hợp của nhiều điểm 3D được tìm thấy sẽ tạo ra các đám mây điểm 3D (3D point cloud), và từ các đám mây điểm này phần mềm có thể tái dựng lại các đối tượng, lâp bản đồ địa hình 3D, cũng như tạo ra nhiều các sản phẩm khác.
Pix4Dmapper xử lý hình ảnh dựa vào việc tìm kiếm tự động hàng ngàn các điểm chung giữa các ảnh có độ chồng phủ (overlap) cao. Mỗi điểm đặc trưng được tìm thấy trên mỗi ảnh được gọi là 1 Keypoint. Khi cùng 1 keypoint được tìm thấy trên 2 ảnh là như nhau, chúng sẽ được kết hợp lại và mỗi nhóm keypoint phù hợp chính xác sẽ tạo thành 1 điểm 3D. Tập hợp của nhiều điểm 3D được tìm thấy sẽ tạo ra các đám mây điểm 3D (3D point cloud), và từ các đám mây điểm này phần mềm có thể tái dựng lại các đối tượng, lâp bản đồ địa hình 3D, cũng như tạo ra nhiều các sản phẩm khác.
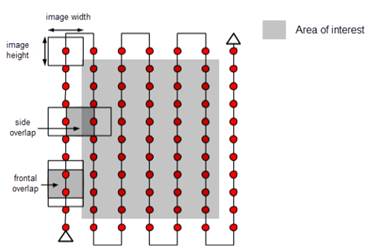 Khi có sự chồng phủ cao giữa 2 hình ảnh, những khu vực chung sẽ lớn hơn và số các điểm keypoint tìm được sẽ nhiều hơn, chúng có thể kết hợp cùng nhau và khi số lượng điểm keypoint càng nhiều, sẽ có càng nhiều hơn các điểm 3D chính xác được xử lý tính toán. Vì vậy, quy tắc chính khi chụp ảnh UAV là phải duy trì độ chồng phủ cao giữa các hình ảnh chụp trên cùng hướng bay và giữa các đường bay.
Khi có sự chồng phủ cao giữa 2 hình ảnh, những khu vực chung sẽ lớn hơn và số các điểm keypoint tìm được sẽ nhiều hơn, chúng có thể kết hợp cùng nhau và khi số lượng điểm keypoint càng nhiều, sẽ có càng nhiều hơn các điểm 3D chính xác được xử lý tính toán. Vì vậy, quy tắc chính khi chụp ảnh UAV là phải duy trì độ chồng phủ cao giữa các hình ảnh chụp trên cùng hướng bay và giữa các đường bay.
Theo đó, việc lập kế hoạch, thiết kế lộ trình và quá trình thu nhận ảnh sẽ tác động trực tiếp đến chất lượng của kết quả bản đồ 3D sau này (tham khảo Lộ trình 1 tuyến bay chụp UAV như hình trên).
III. Quy trình xử lý và sản phẩm kết quả
Quy trình chung xử lý dữ liệu UAV với phần mềm Pix4Dmapper gồm 3 bước chính sau:
a. Bước 1: Chuẩn bị ảnh với các dữ liệu bổ trợ và thực hiện xử lý ban đầu gồm chuẩn hóa, xác định các yếu tố định hướng ngoài, các điểm GCP và điểm tie points…
b. Bước 2: Lựa chọn và lọc bớt các điểm nhằm tăng chất lượng đám mây điểm 3D cho các bước xử lý tiếp theo.
c. Bước 3: Tính toán lập DSM và tạo ảnh ghép trực giao (orthomosaic).
Trong thực tế, việc xử lý dữ liệu UAV với phần mềm Pix4Dmapper có thể thực hiện sơ bộ tại thực địa trong quá trình bay chụp (nhằm có những điều chỉnh kịp thời đảm bảo có được bộ ảnh chụp chất lượng với mức độ chồng phủ cao – thường là trên 75%). Việc xử lý chính thức với các tham số xử lý phù hợp sau đó sẽ được thực hiện tại văn phòng để tạo sản phẩm chất lượng có độ chính xác cao. Việc xử lý ảnh UAV thường rất nặng và tốn nhiều thời gian đặc biệt với dự án bay chụp có khối lượng ảnh chụp lớn. Phần mềm Pix4Dmapper cho phép phân tách bộ ảnh ra thành các khu vực nhỏ để xử lý lần lượt và sau đó, ghép lại thành sản phẩm cuối cùng phủ trùm toàn bộ khu vực dự án.
Sau khi hoàn thành quy trình xử lý, sản phẩm đầu ra bao gồm: đám mây điểm 3D, DSM/DTM & đường đồng mức và ảnh ghép trực giao (Orthomosaic) của khu vực bay chụp cùng với fly through animation với độ chính xác cao và có thể tùy biến cho nhiều ứng dụng GIS hoặc CAD…
Ngoài ra, phần mềm Pix4Dmapper cũng cho phép tính toán nhiều các chỉ số dựa vào giá trị phổ của các kênh phổ trên ảnh đầu vào (nếu bay chụp bằng máy ảnh đa phổ), lập các loại bản đồ cường độ bức xạ, bản đồ chỉ số thực vật, bản đồ nông nghiệp...
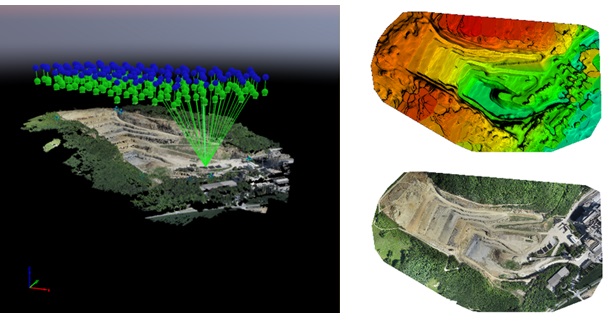
3D point cloud, DSM & Orthomosaic
Tham khảo www.pix4d.com hoặc liên hệ với chúng tôi để biết thêm thông tin chi tiết về phần mềm Pix4Dmapper Pro và khóa đào tạo kỹ thuật xử lý dữ liệu ảnh UAV.
(Lê Thị Khánh Hòa tổng hợp từ nguồn https://pix4d.com, 2016)