I. Nguyên lý công nghệ LiDAR
LiDAR – (Light Detection And Ranging) – là công nghệ viễn thám chủ động sử dụng các loại tia laser để khảo sát đối tượng từ xa. Dữ liệu thu được của hệ thống là tập hợp đám mây điểm phản xạ 3 chiều của tia laser từ đối tượng được khảo sát ở dưới mặt đất.
 Một hệ thống LiDAR điển hình thường được gắn cố định trên một loại máy bay phù hợp nào đó. Khi máy bay bay trên vùng cần khảo sát, cảm biến laze sẽ phát ra các chùm tia laser về phía đối tượng, bộ thu nhận tín hiệu laze gắn kèm với cảm biến sẽ thu nhận tín hiệu phản xạ từ đối tượng. Mỗi một giây hệ thống có thể thu nhận được vài trăm ngàn điểm LiDAR. Các đám mây điểm LiDAR này sau đó sẽ được xử lý sơ bộ dựa trên các phần mềm chuyên dụng. Hệ thống LiDAR còn có thể được gắn kèm máy ảnh số để đồng thời thu thập ảnh chụp (ảnh hàng không) của khu vực khảo sát, cung cấp bổ sung nguồn dữ liệu rất chi tiết và đầy đủ.
Một hệ thống LiDAR điển hình thường được gắn cố định trên một loại máy bay phù hợp nào đó. Khi máy bay bay trên vùng cần khảo sát, cảm biến laze sẽ phát ra các chùm tia laser về phía đối tượng, bộ thu nhận tín hiệu laze gắn kèm với cảm biến sẽ thu nhận tín hiệu phản xạ từ đối tượng. Mỗi một giây hệ thống có thể thu nhận được vài trăm ngàn điểm LiDAR. Các đám mây điểm LiDAR này sau đó sẽ được xử lý sơ bộ dựa trên các phần mềm chuyên dụng. Hệ thống LiDAR còn có thể được gắn kèm máy ảnh số để đồng thời thu thập ảnh chụp (ảnh hàng không) của khu vực khảo sát, cung cấp bổ sung nguồn dữ liệu rất chi tiết và đầy đủ.
Một số thông số đặc trưng của đám mây điểm LiDAR:
-
Tọa độ X, Y và độ cao Z: Được thu nhận dựa theo hệ thống định vị GPS, độ cao máy bay, thời gian di chuyển và phản xạ trở lại của tia laze…
-
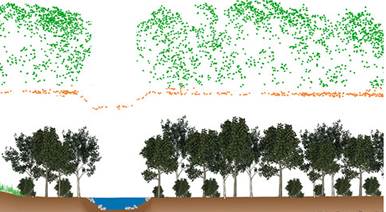
Số lần phản xạ (Return): Các chùm tia laze sau khi chạm vào các đối tượng như tòa nhà, mặt đất, cột điện thì phản xạ (Return) ngược trở lại và được bộ thu nhận tín hiệu laze thu lại. Một vài tia laze khi chạm vào các đối tượng nhỏ, mỏng và có khoảng trống xung quanh nó như cành cây, lá cây thì 1 phần của nó sẽ phản xạ, 1 phần khác sẽ tiếp tục đi tiếp xuống dưới và nếu nó gặp mặt đất thì nó sẽ phản xạ tiếp.
-
Cường độ xung phản xạ (Intensity): Khi tia laze phản xạ trở lại nó sẽ mang theo năng lượng với một cường độ nhất định (Intensity). Thông thường, cường độ xung phản xạ lớn khi tia laze tiếp xúc với mặt đất.
II. Giới thiệu các chức năng LiDAR trong ENVI 5.3
ENVI LiDAR là một modul chuyên sâu dùng riêng cho quá trình xử lý, phân tích dữ liệu LiDAR và từ phiên bản 5.3, module ENVI LiDAR đã được tích hợp vào phần lõi của phần mềm ENVI+IDL. Chức năng cơ bản của ENVI LiDAR là xử lý đám mây điểm LiDAR nhằm chiết tách thông tin địa lý, tạo DEM… (các lớp dữ liệu GIS) cho các CSDL 3D và tích hợp trực tiếp với ArcGIS để sản xuất tư liệu địa hình độ chính xác cao phục vụ các ứng dụng như phân tích tầm nhìn (Viewshed Analysis), kiểm kê rừng, phân tích nguy cơ lũ lụt…
ENVI LiDAR kết hợp việc nhận dạng tự động (sử dụng thuật toán Feature Extraction bản quyền) với các công cụ tương tác để người dùng có thể điều chỉnh các thông số xử lý nhằm kiểm soát được chất lượng sản phẩm kết quả. Với chức năng hiển thị 3D và kết nối trực tiếp với ArcGIS, ENVI LiDAR có khả năng kết nối tốt với các hệ thống xử lý phân tích địa không gian khác, khả năng mở rộng tùy biến thông qua API và đọc được tất cả các định dạng dữ liệu LiDAR thông dụng như LAS, LAZ, ASCII, NITF LAS...
Ngoài ra người dùng có thể sử dụng ENVI LiDAR API để lập trình xử lý dữ liệu cũng như có thể kết nối qua các plugin với các nguồn dữ liệu ngoài (như google, bing...) để hỗ trợ việc xử lý hiệu quả hơn.
III. Quy trình xử lý và sản phẩm kết quả
Quy trình tổng quát xử lý dữ liệu LiDAR trong ENVI 5.3 gồm các bước sau:
a. Công tác chuẩn bị: tạo mới 1 project và đọc dữ liệu từ các định dạng (ví dụ LAS) vào project và hiển thị dữ liệu;
b. Xử lý dữ liệu: kiểm tra mật độ điểm LiDAR và xử lý phân loại dữ liệu (loại bỏ dữ liệu bất thường) bao gồm thiết lập / điều chỉnh các tham số xử lý như lựa chọn khu vực xử lý, xác định sản phẩm đầu ra…;
c. Rà soát kiểm tra chất lượng xử lý và chỉnh sửa các lỗi sai thông qua hiển thị sản phẩm đầu ra (sử dụng 3D Viewer), chỉnh sửa & vẽ thêm đối tượng mới, phân loại lại các điểm LiDAR bị sai nhóm và lưu kết quả;
d. Trình bày và xuất sản phẩm đầu ra, ví dụ lên Google Earth…
ENVI LiDAR cung cấp cho người dùng 2 phương pháp xử lý dữ liệu LiDAR chính: xử lý tự động và công cụ điều chỉnh xử lý thủ công.
Với tính năng xử lý tự động, ENVI LiDAR sử dụng thuật toán nhận biết hình dáng, cấu trúc, độ cao, đặc tính đặc trưng của đối tượng để từ đó nhận biết và chiết tách ra các đối tượng 3D như tòa nhà, cây cối… Các bước để chiết tách đối tượng 3D bao gồm:
-
Tạo 1 thư mục để lưu dữ liệu LiDAR gốc và các sản phẩm đầu ra.
-
Tạo bản đồ mật độ điểm để kiểm tra mật độ điểm LiDAR ở dạng thô.
-
Thiết lập các thuộc tính, thông số cho các sản phẩm dữ liệu đầu ra cần thiết. Tiến hành xử lý dữ liệu tự động.
 Các sản phầm đầu ra của quá trình xử lý tự động bao gồm: Ảnh trực giao (Orthophoto) với các định dạng đầu ra như GeoTiff, PNG, ENVI Raster… Mô hình số địa hình (DSM). Mô hình số độ cao (DEM) với các định dạng đầu ra như *.Dat, GeoTiff… Lớp dữ liệu nhà (Building), cây cối (Tree), đường dây điện (Power Line) với định dạng đầu ra là *.shp hoặc *.dxf. Lớp dữ liệu đám mây điểm đã được phân loại (Point Cloud) với định dạng đầu ra là *.las, *.bin hoặc *.txt. Lớp dữ liệu đường đồng mức (DEM Contours) dạng đường với định dạng đầu ra là *.shp hoặc *.dxf. Lớp dữ liệu mô hình mạng lưới tam giác bất quy tắc (Terrain TIN) dạng vùng với định dạng đầu ra là *.shp hoặc *.dxf. Lớp dữ liệu dùng riêng cho việc hiển thị 3 chiều trên cửa sổ 3D của ENVI LiDAR (3D Viewer Database).
Các sản phầm đầu ra của quá trình xử lý tự động bao gồm: Ảnh trực giao (Orthophoto) với các định dạng đầu ra như GeoTiff, PNG, ENVI Raster… Mô hình số địa hình (DSM). Mô hình số độ cao (DEM) với các định dạng đầu ra như *.Dat, GeoTiff… Lớp dữ liệu nhà (Building), cây cối (Tree), đường dây điện (Power Line) với định dạng đầu ra là *.shp hoặc *.dxf. Lớp dữ liệu đám mây điểm đã được phân loại (Point Cloud) với định dạng đầu ra là *.las, *.bin hoặc *.txt. Lớp dữ liệu đường đồng mức (DEM Contours) dạng đường với định dạng đầu ra là *.shp hoặc *.dxf. Lớp dữ liệu mô hình mạng lưới tam giác bất quy tắc (Terrain TIN) dạng vùng với định dạng đầu ra là *.shp hoặc *.dxf. Lớp dữ liệu dùng riêng cho việc hiển thị 3 chiều trên cửa sổ 3D của ENVI LiDAR (3D Viewer Database).
 Với tính năng xử lý thủ công, ENVI LiDAR cung cấp cho người dùng một loạt các công cụ xử lý, phân tích hữu ích. Chế độ QA Mode (Quality Assurance) cho phép người dùng điều chỉnh chi tiết và xử lý thủ công đối với các dữ liệu sai hoặc chưa chính xác:
Với tính năng xử lý thủ công, ENVI LiDAR cung cấp cho người dùng một loạt các công cụ xử lý, phân tích hữu ích. Chế độ QA Mode (Quality Assurance) cho phép người dùng điều chỉnh chi tiết và xử lý thủ công đối với các dữ liệu sai hoặc chưa chính xác:
-
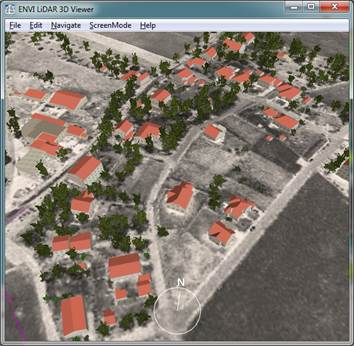
Tính năng xem dữ liệu dưới dạng 3 chiều (ENVI 3D LiDAR Viewer) dùng để kiểm tra tính chính xác của dữ liệu.
-
Tính năng chỉnh sửa các đối tượng vẽ chưa chính xác như hình dáng mái nhà, đường dây điện.
-
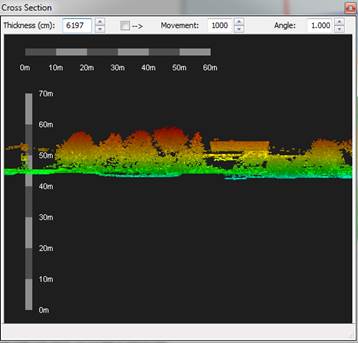
Các công cụ dùng để vẽ các đối tượng còn thiếu như nhà, cây cối, cột điện… Các thao tác chỉnh sửa, vẽ mới đều được thực hiện trên cửa sổ mặt cắt đứng hoặc mặt cắt ngang (Cross Section).
-
Phân loại lại các điểm LiDAR nằm sai nhóm (Classification).
Sản phẩm đầu ra chính của ENVI LiDAR là bộ dữ liệu mô hình số độ cao (DEM) và chiết tách các đối tượng 3D như cây cối, đường dây điện, công trình xây dựng với các yếu tố như hình khối khung nhà và mái, mô hình số bề mặt (DSM)…
Tham khảo http://www.exelisvis.com/ hoặc liên hệ với chúng tôi để biết thêm thông tin chi tiết về ENVI LiDAR và khóa đào tạo kỹ thuật xử lý dữ liệu LiDAR.
(Đỗ Danh Toàn tổng hợp từ nguồn https://exelisvis.com, 2016)